

7100 Series Battery Cell Tester
The 7100 series is designed to meet the demands of testing cell-level batteries for existing and future generations.

Battery Cycler
EV Battery cyclers for charge, discharge and lifecycle testing of EV battery packs and modules. High voltages and currents for electric vehicle testing.

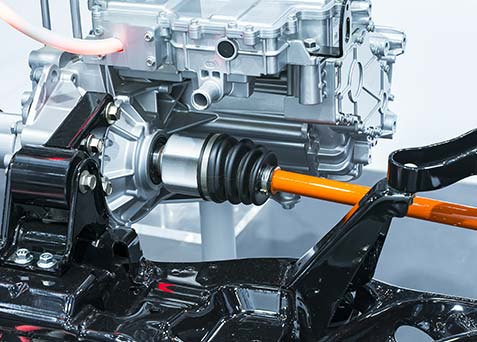
Battery Simulator / Emulator
EV Battery simulators / emulators for testing electric vehicle propulsion and powertrain systems, including traction inverters, E-motors and E-axles.

Universal Inverter
Unico provides modular testing solutions with its Universal Inverter to test E-motors in EV applications. Find out more about this solution

E-Motor Emulator
E-Motor emulators for testing electric vehicle traction inverters. Validate and test different inverter designs to prevent prototype e-motor failure.

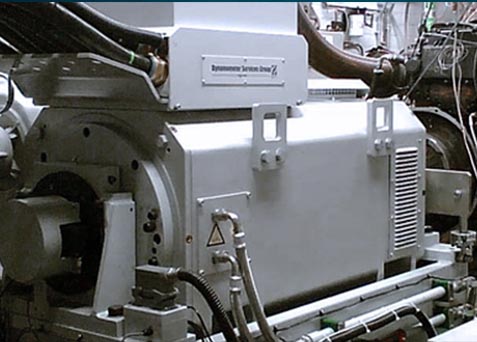
E-Motor Dyno Drive
Unico’s E-Motor Dynamometer Drive system has a unique design that allows the drive to operate any AC motor without the current-loop setup required by conventional drives.

E-Drive Dyno Drive
Unico’s E-Drive Dynamometer Drive system provides internal inertia simulation, that simulates both fixed and dynamic inertias using internal models or external commands.
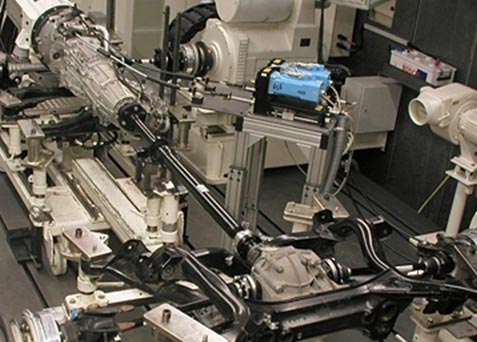
E-Axle Dyno Drive
Unico’s E-Axle Dynamometer Drive system has a torque estimator that eliminates the need for expensive and mechanically complicated torque-measuring devices.

Hybrid Electric Dyno Drive
Unico’s Hybrid Electric Dynamometer Drive system smoothly switches from speed mode to torque mode and back using controlled transitions and programmable ramp rates.

Chassis Dyno Drive
Unico’s E-Drive Dynamometer Drive system has full regeneration to the three-phase power grid. The drive can be configured for ultra-quiet operation required for NVH testing.
Engine Dyno Drive
Unico’s E-Motor Dynamometer Drive system is a proven platform installed throughout the world for durability, validation and high-performance engine testing applications.
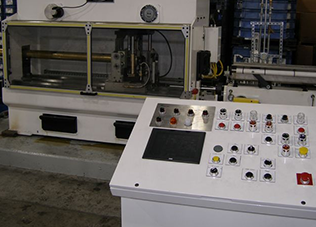
Transmission Dyno Drive
Unico’s Transmission Dynamometer Drive system simulates the real-time torque pulses produced by internal combustion engines. Scalable design for complete 4WD test rigs.

Feed-to-Stop Control
The FTS™ software module from Unico provides automated feeding control for roll-feed applications which enables users to take full advantage of the machine.
Flying Cutoff Control
Unico provides Flying Cut-off control used for flying cutoff die accelerator drive system with the best-in-class flexibility and reliability required for coil processing applications.

Loop/Leveler Control
The Unico Loop/Leveler Control systems for coil processing applications are developed for the optimal control of the leveler and straightener in order to explicitly handle important control specifications.
Metal Rotary Cutoff Control
Unico provides Metal Rotary Cut-off specifically for controlling rotary-cutoff applications with the best-in-class flexibility and reliability required for the metal industry.

Position Indexer Control
Unico provides Position/Indexer Control PIC™ software specifically for controlling linear- or rotary-indexer applications with the best-in-class flexibility and reliability.

Press / Sheer Control
Press / Shear Control PSC™ software from Unico allows swift control of press and shear applications in the metal industry. It comes with best-in-class flexibility and reliability.

Uncoiler / Recoiler with Tension Control
The Unico Uncoiler / Recoiler with Tension Control URC™ software module provides superior control of unwinding and rewind applications in the metal industry.
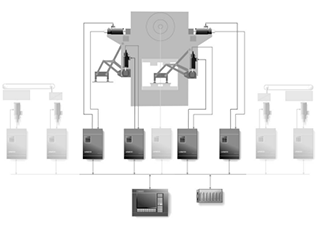
Embedded Profile Control
The Unico Embedded Profile Control system is a scalable motion control system designed specifically for metal forming applications. It provides coordinated motion control for up to 20 drives in as many as 20 independent axes in its standard configuration.
STF® Servo Transfer Feed
The standard STF® system provides coordinated motion control for as many as 16 drives in four independent axes, while custom systems can control a virtually unlimited number of drives and axes. The servo system provides electronic line shafting that eliminates the large gearboxes...

SRP Variable Speed Drive
Unico’s SRP sucker rod pump drive provides unmatched autonomous production optimization, equipment protection, energy efficiency, and remote well analytics to maximize the performance of your well. It features fast acting intra-stroke control with reliable, hands-off, self-adjusting operation to unburden your operators.

ESP Variable Speed Drive
Unico’s ESP electric submersible drive provides rugged and reliable motor control with advanced automation, featuring high efficiency, low harmonics, and best-in-class motor and pump protection.

PCP Variable Speed Drive
Unico’s PCP progressive cavity pump drive provides precision torque and speed control with advanced features, protecting the rod-string while providing controlled backspin and power-loss ride-thru. Sensor-less fluid level estimate and control protects against pump-off. Downhole modelling provides inferred pump load and velocity for pump diagnostics including stick/slip identification.

Rod Pump Controller
Excluding a VSD, but using the same control board as an SRP VSD, Unico’s stand-alone RPC sucker rod pump controller includes many of the same features as our SRP drive, including enhanced start/stop pump-off control using surface and downhole dynamometer plots. It supports traditional and hydraulic pumping unit. Engine control is optional.

Linear Rod Pump
Unico’s LRP® sucker-rod pumping unit is an alternative to traditional horsehead units, featuring a streamlined design, safety, small footprint, and sophisticated automation to maximize well production and extend downhole equipment life.

Crank Rod Pump
Unico’s CRP® sucker-rod pumping unit is a compact, short stroke, crank driven unit designed specifically for shallow, low-flow coal-bed methane and stripper wells. Its full-featured SRP software includes patented Flat Power and solar MPPT, making it a perfect fit for 100% PV solar operation for off-grid and remote locations.

Well Analytics
Well Analytics System by Unico is an efficient, cost-effective way for oil and gas producers to stay connected to the most critical aspects of daily operations.

Real Time Monitoring
The GMC® system continuously collects data from an unlimited number of wells and fields and makes that data accessible from virtually anywhere at any time over the Web.

Notification and Alarms
A sophisticated subscription service alerts users when specific conditions are detected. Notifications can be triggered, for example, whenever a fault occurs, when specific...

Automated Well Reports
Comprehensive well reports can be generated automatically or on demand. SRP reports include both surface and downhole dynamometer graphs. Users can simultaneously compare...

Double Facer / Backer Control
The double facer/baker control drive from Unico improves the production process of paper conversion while providing complete safety from wear with advanced controls and diagnostics.

Pull Roll Control
For an economical and highly effective choice for your paper converting needs, look no further than the Unico Pull Roll Control drive.
Rotary Cutoff Control
Controlling the rotary cut-off during production has become much easier with the Unico smart and easy rotary cut-off control.

Single Facer Control
The single facer control drive from Unico provides the best control options for paper converting applications. It can help users to automate and optimize the manufacturing process.

Slitter / Scorer Control
Along with multiple manual and automatic modes, the Unico slitter scorer control drive is equipped with the latest technology to perform every task with more efficiency.

Web AOC Shear Control
Unico’s Smart Web AOC Shear Drive can be used alone or as part of a multidrive corrugator dry-end system. The drive controls the shear during the automatic-order change (AOC) sequence and scrap chop-out

Feed to Register Control
Get the control at your fingertips with Unico smart and automatic feed to register control drive and become a paper converting industry expert.

Rotary Die Cutter Control
The Unico rotary die clutter control drive equipped with modern tech makes your paper converting methods easier, fast, reliable, and more flexible.

Rotary Printer Control
The Unico Rotary Printer Control drive can help you make your paper converting process more explicit, manageable, fast, and firm with advanced software control and digital technology.

Sheeter Control
Unico’s high-performance sheeter control systems provide comprehensive solutions at low cost and more flexibility. Our sheeter control yields optimal cut accuracy, throughput, and energy savings with paper and board applications.